Global Mapper 27 is here. Geodetic accuracy, built into every workflow.
Global Mapper Pro is the all-in-one GIS solution, used worldwide
V27
Global Mapper Pro® expands upon the extensive functionality of the standard version of the application for those who need advanced GIS software solutions. You can utilize a comprehensive collection of tools for advanced 3D analysis, lidar and photogrammetric point cloud processing, drone-collected image analysis, Python scripting methods, machine-learning integration and much more. The comparison chart below shows the features and tools available in the Standard and Pro versions of Global Mapper.
Recent Developments in Global Mapper Pro
Global Mapper Pro® expands upon the extensive functionality of the standard version with 3D analysis, drone data, and lidar processing.


Do more with the this state-of-the-art GIS software solution by utilizing the Global Mapper Insight and Learning Engine™. The deep-learning image analysis tools in the Insight and Learning Engine provide built in models for land cover classification, building extraction, and vehicle detection. Utilize the fine-tuning and training tools to tailor the models to improve model performance on your own datasets. Configuration settings allow users to share custom models, and download the latest models from Blue Marble Geographics.
Create a 3D point cloud, orthoimage, and 3D mesh products from drone or UAV collected images utilizing Pixels to Points in Global Mapper Pro. The Pixels to Points Wizard allows users to select from predefined project types and optional outputs, or create their own. Leverage the ability to automatically place GCPs to further control output product accuracy.
Global Mapper Pro offers the opportunity to fully classify 3D point cloud data. Automatic ground, building, tree, powerline, and pole classification and feature extraction tools work with lidar or photogrammetrically-generated point cloud data. Utilize manual classification options for more precise control.
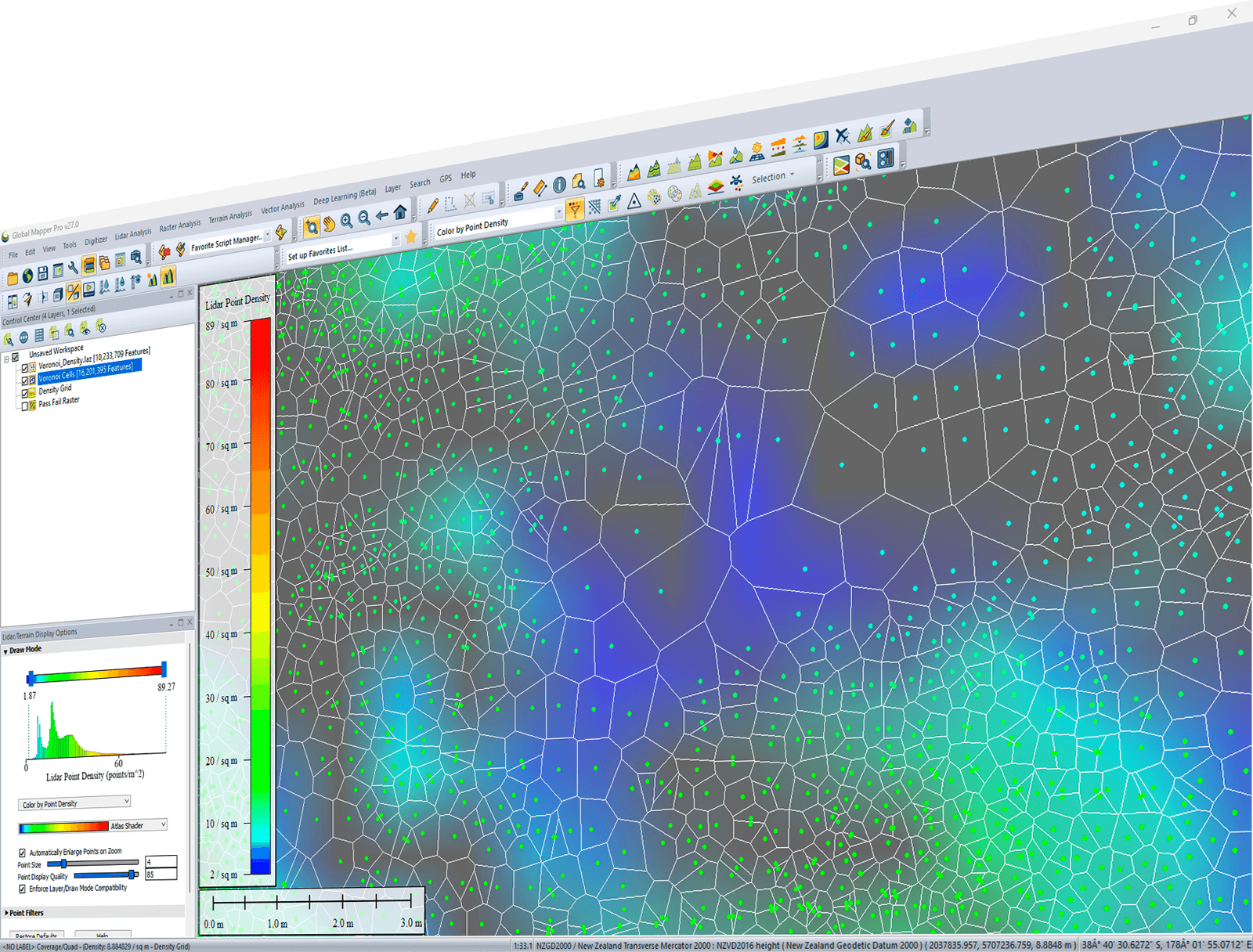
Lidar QC tools allow for the refinement of the 3D position of a point cloud, point clouds can be split into layers based on attribute, and automatic processing reports can be generated.
This tool allows users to identify features of interest in a point cloud based on certain parameters or attributes. Whether color, elevation, intensity, or another parameter is important in defining a feature, users can provide values to allow the tool to identify points which meet these requirements. The flexibility and customization in this tool, combined with a selection method to select and edit individual segments, greatly improves manual classification, to achieve custom point cloud classification in a semi-automated process.
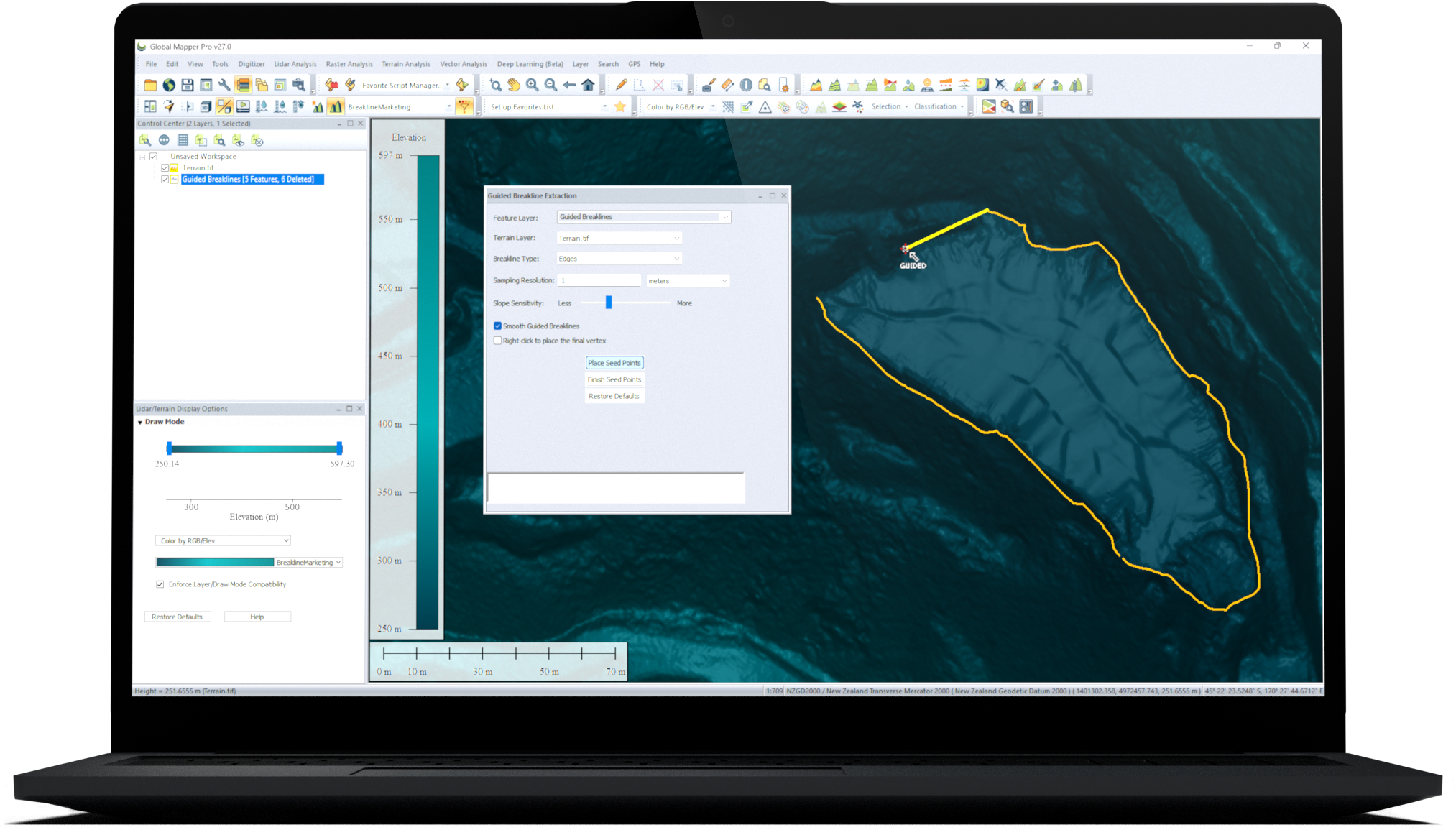
Global Mapper Pro has an array of terrain analysis tools. From advanced binning and kriging methods to create a surface, to terrain painting to live edit the terrain users can prepare their data a variety of ways. The results of this process can be analysed via watershed modelling, viewshed analysis, contour generation or a slew of other tools available in Global Mapper and Global Mapper Pro
Custom Point Cloud Classification provides the ability to define custom classifications based on user-created training samples. Each training sample should represent a variation of a definable class of objects that can be used to create a new, user-trained point cloud classification. The attributes and shape of the sample points will be used to generate a signature that will be the basis of the new custom classification model.
Once finished, new classifications will appear in the Features to Classify list in the Classification tab to be used along with the built-in Feature Classes, such as Vegetation and Buildings. Custom classes can be saved for future use, or to share with colleagues.
Based on Python v3.10, Global Mapper users are now able to automate workflows in the program using the Python programming language. Not replacing Global Mapper Script, but adding to the scripting language options, Python scripts can be written in the new Script Editor or outside of Global Mapper, and run within the Global Mapper interface, via the command line, or in a Python environment.
The Script Builder tool transforms actions taken in the user interface into Global Mapper Script or Python commands with an easy-to-use record button.
For manual script creation, editing and execution, the interactive Script Editor allows users to open multiple scripts in a tabbed interface and save them individually. Frequently used scripts can now be saved for easy execution in the Favorite Scripts manager.
The powerful Variography and Kriging analysis tool improves data prediction in Global Mapper Pro. Fully customize the data sampling and variogram plot and determine what theoretical model fits best for the generation of a kriged prediction layer.
Pairing with Global Mapper Pro is Global Mapper Mobile, an app available on iOS and Android for field data reference and collection. Wirelessly share data to a mobile device directly through Global Mapper desktop’s Mobile Data Management tool. Additionally, through this tool, Global Mapper Mobile Package files can be merged to combine datasets created by different field collectors.
Create 3D mesh products from a variety of terrain, point clouds, and 3D vector data. Volumetric mesh features can also be created as spheres and cylinders to more effectively model volume in a variety of workflows. Export these products to a variety of 3D formats to use in gaming engines, simulated environments, and more.
Compare the Standard and Pro features to find out!
Standard license includes:

All the great features of standard plus...

Global Mapper Suite
Everything you need in GIS software
A comprehensive suite of GIS desktop and mobile applications as well as a software development kit with tools to satisfy the needs of a wide range of workflows.
![]()
Trusted by GIS professionals worldwide
Global Mapper® is a cutting-edge GIS software that provides both novice and experienced geospatial professionals with a comprehensive array of spatial data processing tools, with access to an unparalleled variety of data formats.

Geospatial data viewing and collection in the palm of your hand
Global Mapper Mobile® is an iOS and Android application for viewing and collecting GIS data. It’s a perfect complement to the desktop version of Global Mapper, providing maps-in-hand functionality for field data gathering. The Pro version of the application expands on the functionality of the application, with an array of professional-grade tools.
![]()
Advanced GIS Software Development Kit
The Global Mapper Software Development Kit® (SDK) is a toolkit that provides access to much of the functionality of the desktop application from within an existing or custom-built application, allowing in-house developers to create a unique version of the software to meet their specific needs and requirements.
Global Mapper Pro offers a complete set of GIS tools.

