Lidar Display
The Lidar Display tab provides the ability to customize how point are displayed in the selected layer(s).
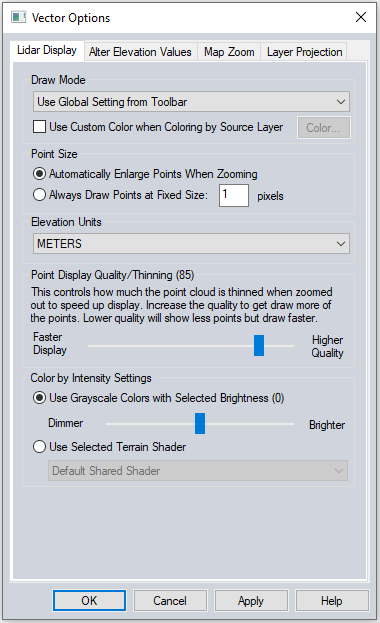
Draw Mode
Allows the user to apply a Lidar Draw mode (Color Lidar by..) to a specific layer, independently from the Global Setting.
By default, this is set to 'Use Global Settings from Toolbar' which colors lidar by the draw mode currently specified on the lidar toolbar dropdown / Lidar Terrain Display Control. When layer option Lidar Display Draw Mode is set to something other than the global setting, the layer will use its own explicitly set draw mode, thus overriding the global setting.
Color by RGB/Elev — Colors the Lidar points by Red, Green, Blue (RGB) values if present, otherwise will use the elevation values.
Color by Elevation— Applies a color spread to the range of elevations found in the Lidar data.
Color by Intensity — Color lidar points from black to white by the intensity of the return pulse. Lidar classified with this method can sometimes be used in place of aerial imagery. Most topographic lidar systems record the intensity of the return pulse, measuring the strength of the return. The number of returns will be determined by the composition of the surface object reflecting the return.
The Intensity values can be used to create an image, and are commonly used for identifying and classifying different ground features.
Color by Classification — Colors Lidar points by the ASPRS defined classification values. Customize the colors from the Filter Lidar Data tool.
Color by Return Number — Applies a color spread to the range of return values, which typically range from 1 to 5.
Color by Height Above Ground — The ground height is calculated from the Lidar point cloud, either from the surface group of Lidar classes (Ground, Road and Water) or by the minimum elevation in large chunks. When there are no points classified in a surface class, such as ground, this height above ground calculation is not exact. The process may take a few moments to calculate the first time, as ground height is determined for each individual point.
Color by Segment — This will distinctly color points based on the segment ID assigned with the Geometric Segmentation tool, or by the Automatic Building and Tree Classification and Building Extraction tools.
Color by Point Density —Color points using calculated point density. The point density is calculated based on the full point cloud loaded in the layer. To visualize the point density for a single classification, the subset of points must be loaded or copied to new layer.
Color by Scan Angle - Lidar points will be colorized using the scan angle attribute. Values range from -90 to 90. The color of the points will be determined by the Shader Option chosen in the workspace.
Color by Point Source ID — This value will indicate the file from which the point originated. Valid values are between 1 and 65,535. Allows for flight paths of Lidar data collection to be visualized.
Color by Source Layer — Applies a unique color to each loaded point cloud layer. A specific color can be selected for a layer in the Lidar Display for the layer.
Color by Point Index— This will color the points in 512 point chunks with the same color, allowing visualization of how the points are stored spatially in the file. This is useful for things like improving compression by visualizing the spatial arrangement and testing re-arrangement to get better compression. If there is no pattern to the point index display colors, and this display mode shows a noisy mix of colors, the point cloud is not ordered in a way that is spatially organized, and that can impact display and processing times. See the Global Mapper Package export or Selected Layers Context Menu for options to reorder points spatially.
Color by CIR (Color Infrared)— This will color points with the band layout NIR/Red/Green. This is how 4-band infrared data is commonly visualized. The vegetated areas tend to be red.
Color by NDVI (Vegetation) — Colors points using the calculated NDVI value (computed from NIR and Red bands) using Global Mapper's built-in NDVI shader. Vegetated areas will be green and non-vegetated areas will be a shade of blue.
Color by NDWI (Water) — Colors points using the calculated NDWI (Normalized Difference Water Index) value (computed from the NIR and Green bands) using the new built-in NDWI shader. Water areas (NDWI > 0) will be blue and non-water will be white/gray.
Color by Withheld Flag — Points flagged as withheld will appear red. All other points will appear blue.
Color by Key Point Flag — Points flagged as Key Points will appear red. All other points will appear blue.
Color by Overlap Flag — Points flagged as Overlap points will appear red. All other points will appear blue.
Color by Return Height Delta —This will color points by the difference in elevation between the first and last return of a multiple return. This will be the height in meters between the elevation of the first return and last return. For example, for a tree where the first return was near the top of the tree and the last return was off the ground, it could be the height of the tree.
Color by Generic Value — Lidar supports a generic attribute field that can be assigned any display name. In Global Mapper, these are written by the Compare Point Clouds tool (DIST_M) and the Variography and Kriging tool (GENERIC). This draw mode will work on any value in the Generic field, regardless of display name.
Color by Generic Uncertainty Value — Colors points based on uncertainty score of the kriged estimate for the point.
Color by (Other Attribute) — If lidar data contains Extended Variable Length Records, they will be read as attributes. Lidar can be colored by any of these, and the name of the draw mode will match the name of the attribute.
The following Lidar Draw modes are available only if the point cloud has the relevant attributes. Segmentation and it's classification methods are used to calculate these attributes, and will automatically add them to a layer.
Color by Normal (Abs Vector) — Colors lidar by the direction that is perpendicular to a local plane for each neighborhood of points (neighborhood size is set by resolution.) The absolute values of the x, y, and z coordinates representing the normal vector are converted into red, green, and blue (RGB)values.
Color by Curvature — Colors lidar by the amount of curvature present in each point's neighborhood. (Radians/M^2)
Color by Curvature (Vector) — Colors points using RGB values to represent the amount of curvature in each direction XYZ.
Color by Intensity Gradient — Colors lidar by the change in intensity.
Color by Intensity Gradient (Vector) — Colors lidar using RGB values to represent the magnitude of change in intensity in each direction XYZ.
Color by Principal Component (Vector) — Colors points using RGB values to represent the i,j,k description of the principal component of that point's neighborhood. The quantities are proportional to the eigenvalues of the covariance ellipse constructed from all points in the neighborhood. A covariance ellipse is a 3D Gaussian distribution defined by the points in the local neighborhood. If you look at any one axis, the magnitude (principal component) is analogous to sigma^2 for the 1D case. This means that for a cluster of points on a plane, one of the components will be very small. For points on a line, two of the components will be very small. If points are evenly distributed (visualize a fuzzball), then all components are equal.
Color by Eigentropy — Colors points by the entropy associated with the principal components. Higher values mean more chaos. For example, entropy in a flat surface is very low, but it is high in vegetation.
Use Custom Color when Coloring by Source Layer
Check this option and use the Color... button to select a specific color to be used when the Lidar Draw Mode is set to Color Lidar by Source Layer.
Point Size
Specify how large to draw the points. The default setting will draw points small, but enlarge them when zoomed in. Alternately, specify the size in pixels to draw each point.
Elevation Units
This setting controls the interpretation of the Z values in the file. Changing this unit will change the units used to read the elevation values from the source file.
Point Display Quality / Thinning
To speed up rendering of data, the point cloud display can be thinned or decluttered visually in the 2D map view. Note this does not effect the 3D view, which renders more points closer to the camera.
Color by Intensity Settings
Use Grayscale Colors with Selected Brightness — This slider can be used to make points lighter or darker when in Color by Intensity draw mode.
Use Grayscale Colors Stretched to Custom Intensity Range — This slider specifies a range of intensities to color, with all intensity values below the minimum colored black and all values above the maximum colored white.
Use Selected Terrain Shader — When in Color by Intensity draw mode the shader selected from this dropdown menu will be used to color the points according to their intensity.