_35x35.jpg) Compare Point Clouds
Compare Point Clouds
The Compare Point Clouds tool performs a change detection between a set of point clouds, or between point clouds and a gridded layer, to find points that have changed more than an allowed minimum difference. This can be used both to determine edits that have been made to a file, and also to detect change over time when the layers are from two different time periods. With change over time, the data may have some minor variation from the collection discrepancies which can be ignored with the minimum distance setting, and then the larger changes in the terrain will be detected between the two clouds.
|
|
This tool requires Global Mapper Pro |
Select the Compare Point Clouds button from the Lidar Toolbar.
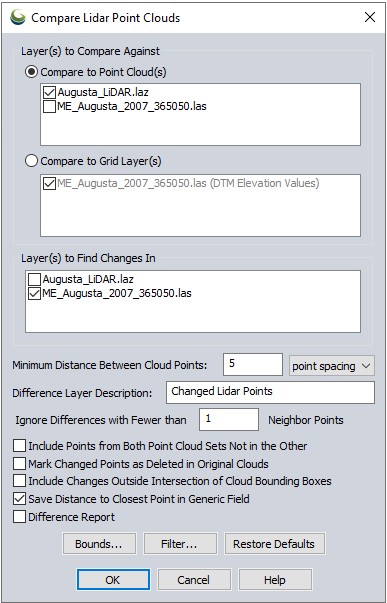
Point Cloud(s) to Compare Against
Select the reference point cloud(s) or grid layer(s). If this comparison is for detecting change over time, this would typically be the initial starting point cloud/grid.
Point Cloud(s) to Find Changes In
Select the point cloud(s) that will be searched for differences. In a change over time analysis, this would typically be the later observation.
Settings
Minimum Distance Between Point Clouds – Specify the minimum 3D distance to be considered a significant change between the two point clouds. Only points that have a difference greater than or equal to the minimum distance will be marked as change points. Use this setting to ignore minor differences between point clouds that may occur between different collection times, to find only the significantly changed points.
-
Change Points represent points which are outside of the Minimum Distance Between Point Clouds value. They are not included in calculations for Mean or Standard Deviation, but are used in the Completeness Calculation.
Difference Layer Description – Set the name of the output point layer than contains the changed points.
Ignore Differences with Fewer than x Neighbor Points – This setting will help to ignore noise points that may not match the comparison cloud, but do not represent enough of a cluster of changed points to be significant. For example, you may only care about areas where 5 or more nearby points show up as different from the reference point cloud.
Options
Include Points from Both Point Sets Not in the Other – By default the output layer of changed points will only include points from the clouds checked for Point Clouds to Find Changes In. Check this option to include points that are significantly different in either the reference cloud or the changed cloud. This will produce multiple changed lidar point layers, one for each input layer.
Mark Changed Points as Deleted in Original Cloud – Check this option to delete the changed points from the original layer. See Deleting and Undeleting Features for more information.
Include Changes Outside Intersection of Cloud Bounding Boxes – Check this option to include points outside of the intersection of the input point clouds as change points. The default when this is unchecked is to only compare the horizontal extent cover the overlap in bounds of the reference cloud(s) and change cloud(s).
Save Distance to Closest Point in Generic Field - Check this option to store the distance to the closest point in meters as a generic type attribute labeled DIST_M. This value is always measured and stored in meters, regardless of data. To visualize these values in the workspace, change lidar draw mode to Color Lidar by Generic Value.
Difference Report - This option generates 3 windows in Global Mapper to help evaluate distance between the clouds.
Color the cloud in the workspace to match the histogram values by choosing selecting "Color Lidar by Generic Value" in the Lidar Draw Mode drop-down menu.
Export these graphs using the Capture Plot Window to File options in the Cloud Difference table.
-
Source to Reference Distance histogram - distance between the source cloud (Find changes in) and the reference cloud (Compare Against).
-
Reference to Source Distance histogram - distance between the reference cloud (Compare Against) and the source cloud (Find changes in) .
-
Cloud Difference tables - contains values for metrics and plot controls. Distance is an average over all points in the cloud.
-
Completeness- measures coverage as the fraction of points in the point cloud that have a counterpart within the gating distance in the other cloud.
-
Save Report- exports the property grid to a text file.
-