
An elevation grid can be generated from any combination of loaded vector data that contains an elevation attribute. This includes 3D vectors, lidar and point cloud data, and mesh / 3D model features.
This tool can be found in the Analysis Menu and in the Analysis Toolbar as a button: Create Elevation Grid from 3D Vector Data.
Use the Grid Creation Options dialog to configure how the elevation grid is to be created from the selected vector data, as well as what portion of the selected overlays to use when creating the elevation grid. The Tiling tab can also be used to tile into sections.
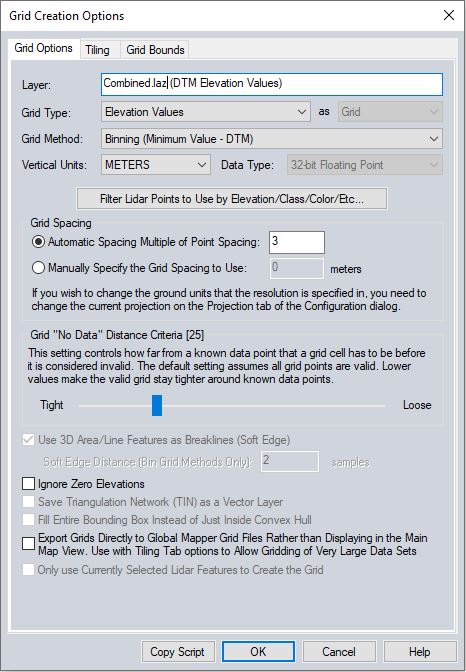
When Lidar data is loaded, the Grid Creation Options will provide a larger dialog with additional options.
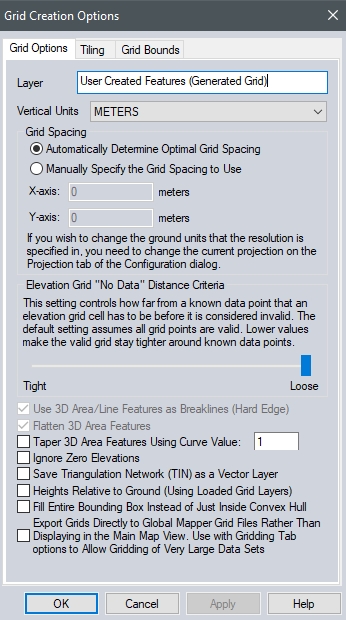
Layer - Layer name and description for the resulting elevation grid.
Vertical Units - Specify the output elevation units for the grid.
Data Type - This option controls whether generated color grids use 8-bit or 16-bit values. This option is disabled when gridding by elevation values.
Grid Type
This option will appear when gridding Lidar data. Elevation Values is the default input. With Global Mapper Pro, grids may also be created from additional attributes of the 3D points.
- Elevation Values - This is the default grid type. This will create a terrain grid of the elevation values.
- Intensity Values - Create a raster grid of the intensity values. The intensity value in a lidar point cloud measures the strength of the signal return to the sensor from the lidar pulse. The intensity of the return is due to the reflectivity of the surface struck by the pulse.
- Height Above Ground - Save the calculated height above ground value as a terrain grid, rather than the absolute elevation. In the output terrain grid, a value of 0 will represent ground. For more information about the height above ground calculation for lidar data see Color Lidar by Height Above Ground
- Color (RGB) - This will create an orthoimage from the RGB values of the point cloud. This is calculated using the color of the highest point in the point cloud at each grid spacing.
- Color (RGB+Intensity) - This will create an orthoimage of RGB colors plus intensity as 4-band.
- Color (RBG+NIR) - This will create an orthoimage of RGB colors plus NIR as 4-band.
- Color (RGB+Intensity) - This will create an orthoimage of RGB colors plus intensity as 4-band.
- NDVI (vegetation) - This requires point cloud data with RGB and also NIR values. This will grid the calculated NDVI value.
- NDWI (water) - This requires point cloud data with RGB and also NIR values. This will grid the calculated NDWI value.
- Point Density - This will grid the point density calculated for each point. See also Create Density
Grid (Heat Map) from Point Data
- Classification Codes - This will create a gridded raster of the class codes. This can be used like LULC or clutter grid data.
- Red - This will create a orthoimage from the red color attribute from the point cloud (single band).
- Green - This will create a orthoimage from the green color attribute from the point cloud (single band).
- Blue - This will create a orthoimage from the blue color attribute from the point cloud (single band).
- NIR - This will create a orthoimage from the near infrared (NIR) attribute from the point cloud (single band).
- Scan Angle -This will create a orthoimage from the scan angle attribute from the point cloud.
- Point Source ID - This will create an orthoimage from the point source ID attribute from the point cloud.
- User Data - This will create an orthoimage from the user data values from the point cloud.
- Scanner Channel - This will create an orthoimage representing the scanner channel attribute from the point cloud.
- Number of Points in Cell - This will create an orthoimage representing the number of individual lidar points in a cell.
- Color Lidar by Generic Value — This will create an grid layer of the krige estimate value generated by the Variography and Kriging tool.
- Color Lidar by Generic Uncertainty Value — This will create a grid layer from on uncertainty scores from the Variography and Kriging tool.
Grid Method
Select the grid method. With Global Mapper Pro, Binning (minimum value, average value, maximum value, median, and variance) and Kriging options are available.
-
Triangulation
This setting uses a triangulated irregular network connecting the known elevation values.
-
Binning an Elevation Grid
Binning is a processing data modification technique that takes point data and creates a grid of polygons, or bins. The value of each bin or polygon is representative of the point values within it. This will reduce the number of data points and speeding up the grid operation. While it will speed up an operation, Binning changes the way data is shown at small scales and can result in decreased accuracy, but will also reduce 'point congestion'.
Binning lays a regular grid over the point cloud within the defined boundaries of the operation. The minimum / maximum / average / median / variance of point elevations (or the value specified in Grid Type) in each bin rectangle are found. An inverse weighted distance algorithm is used to fill in the gaps, the Grid Tightness setting allows you to customize how 'Loose' or 'Tight' the interpolation is. Make the bins at least 2-3 point spacings apart to reduce/ eliminate the spikes or troughs where just a single point is in a bin.
For bare earth/ ground points only (DTM), select Minimum. Use Maximum for the highest level points (i.e. buildings and trees includes) for a DSM.
-
Kriging
This setting creates a grid of Kriged estimates. Variogram and kriging parameters are estimated from grid spacing settings, and the No Data Distance Criteria slider. More information on kriging can be found on the Variography and Kriging page.
This option is only available for lidar data.
Grid Spacing
With Lidar data loaded, the grid spacing may be calculated as a multiple of the calculated point spacings by using the option Automatic Spacing Multiple of Point Spacings and specifying a point spacing value.
Alternatively, the Manually Specify the Grid Spacing to Use option will allow you to select the grid spacing in meters.
Elevation Grid "No Data" Distance Criteria
This setting controls how far from a known data-point that an elevation grid cell has to be before it is considered invalid.
The distance across which the interpolation will occur is determined by multiplying the diagonal size of a single grid cell of the specified resolution (grid spacing) by the number of 'cells' or pixels set as the ["No Data" Distance Criteria].
- A "Tight" setting will only create grid cells close to known elevation values, and leave 'No Data' holes where the distance is too far.
- A "Loose" setting will interpolate using the Grid Method to fill in all elevation values in the extent. To fill across any size gap, adjust the slider all the way to the right where the [distance value] disappears.
Breaklines and Flattened Areas
Use 3D Area/Line Features as Breaklines (Soft Edge)
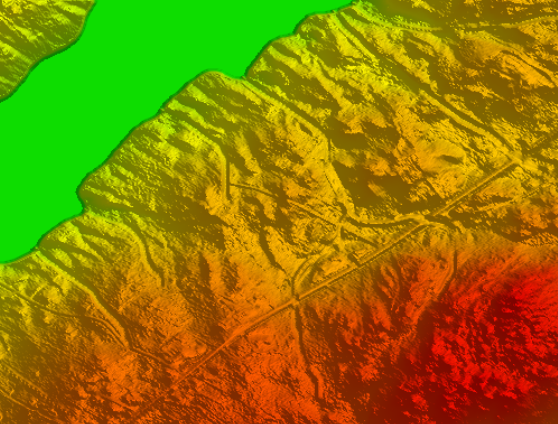
The Use 3D Area/Line Features as Breaklines (Soft Edge) option is available when gridding lidar data using a Binning Grid Method. When checked, the elevations of area and line features (in layers selected for use in the grid creation) will be enforced in the output elevation grid. This will burn the area and line features into the grid, using interpolation to smoothly transition to the surrounding elevation values based through the Soft Edge Distance.
This setting is useful for hydro-enforcement, to ensure that water modeling flows correctly through the terrain and water bodies appear flat. It may also be used to automatically flatten building sites, or to enforce road areas.
The input vector data may contain single elevation values for the feature (i.e. breaklines, contours, etc.), or may contain per vertex elevation values (i.e. streams, inclined area features, etc. ). Vector features with no elevation values, or elevation values relate to ground will be ignored. The line features will be burned into the elevation layer first followed by the area features.
|
|
|
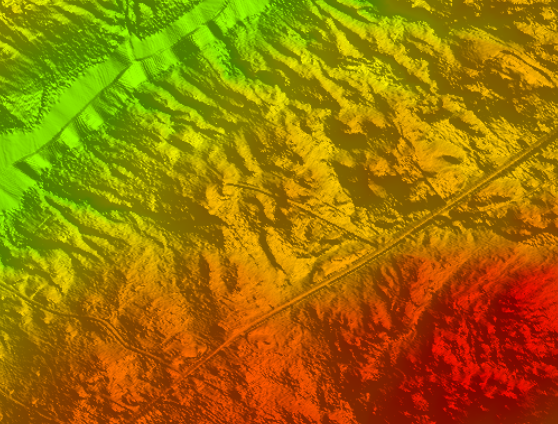
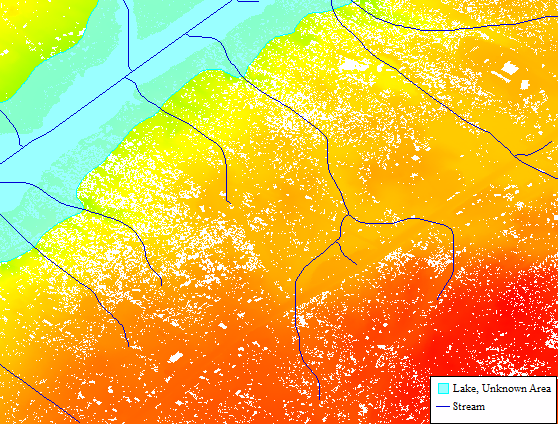
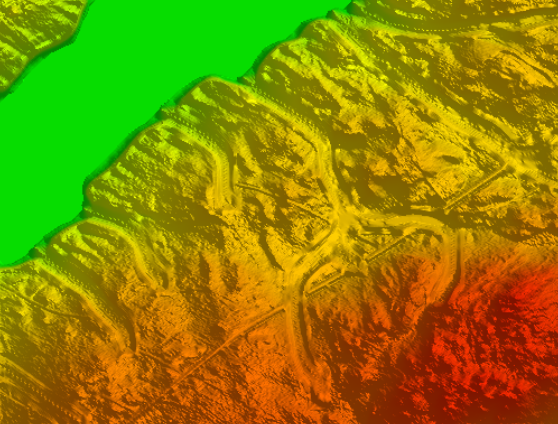
| Elevation Grid using binning and 3D Area/ Line Features as Breaklines | Elevation Grid using binning and no breaklines | Input Lidar points, and area and line features |
Soft Edge Distance
Specify how many pixels surrounding the area and line features will be used as a transition zone between the vector features and Lidar data. The elevation values inside of the soft edge will be calculated using inverse distance weighting (IDW).
|
|
|
|
| Terrain Grid with a soft edge of 3 samples | Terrain Grid with a soft edge of 10 samples | Input Lidar points, and area and line features |
Use 3D Area/Line Features as Breaklines (Hard Edge)
This option is available when choosing Triangulation as the Grid Method, or when creating an elevation grid with no Lidar data.
When checked, line and area features with a defined elevation will be used as the precise elevation for every pixel all along the line. This will ensure that elevation values along the line boundary will exactly match the elevation, for example with contour lines. When not checked, the elevation values are only applied directly at the vertices, and other elevation values are interpolated.
Flatten 3D Area Features
When creating a terrain surface from a vector area feature, this option will flatten the interior area based on the Z value given in the area feature. When unchecked the area feature will inherit variable elevation based on the underlying ground elevations, and the area Z value will only apply at the area vertices.
Taper 3D Area Features Using Curve Value
When this option is checked, the elevation data will taper to the highest most point using the given curve value.
If there are 3D area features and the option to flatten 3D area features is checked, the taper option specifies that rather than making the areas absolutely flat, the edges will be tapered. The area elevation value will be applied to the centroid of the area, dwindling to zero as you reach the area edge.
The curve value specifies the exponent to apply to the percent distance a sample location is between the area centroid and the area edge, to adjust the height applied at that location. A value of 1 provides for a linear taper. Values less than 1 will make the edge steepness progressively greater (i.e. flatter at the middle, then steep edges), while values larger than 1 cause the steepness to be near the area centroid and flatter towards the edges. For example, if you want to simulate a sand bunker for a golf course, a value of around 0.5 provides a decent simulation of a bunker.
When unchecked, the elevation data will shift sharply in order to exactly match height values at any given point.
Only grid TIN Areas (Ignore Lines/Points)
When enabled, this option will only use the 3D TIN face areas to generate the gridded layer.
Additional Options
Ignore Zero Elevations - Checking this option will cause all values with a value of 0 to be ignored on elevation creation. This is useful if you have a data set where features with no known elevation are marked with an elevation of zero.
Heights Relative to Ground (Using Loaded Grid Layers) - If there is already elevation data loaded into Global Mapper, then checking this option will cause all height values generated by this process to be relative and use the existing elevation data as a base. This is very handy for doing things like creating building models where the building height above ground is known, but not necessarily the height above sea level.
Fill Entire Bounding Box Instead of Just Inside Convex Hull - When checked, this will generate a rectangular area surrounding all given data and will fill that area with data. Otherwise, the valid values will only fill out to the convex hull polygon of the data being gridded.
Export Grids Directly to Global Mapper Grid Files - This option will automatically save out a Global Mapper Grid File upon elevation data creation. Data will still be loaded into Global Mapper upon creation.
Only use Currently Selected Lidar Features to Create the Grid - Choose this option if you want to grid only the Lidar points selected in the workspace rather than all the points.