Global Mapper has accelerated handling of point cloud data in the following formats:
- BPF*
- DGN
- E57*
- Geodatabase (Esri)
- GvLF Lidar database format (.gvl)
- LandXML
- LAS files
- LAZ files
- MrSID MG4 (Extensis)
- PLY (Stanford Polygon Library)
- PTS Point Cloud (Leica)*
- PTX (Cyclone)
- RCP / RCS (autodesk)
- TerraScan .bin/.ts format
- ZFS lidar (Z+F)
- zLas (Esri)
*These formats require Global Mapper Pro to load.
Global Mapper can also import any tabular/ ascii format as lidar, such as XYZ, XYZI, txt, etc, by selecting the Import Type Lidar Point Cloud in Open Generic Text File . Special attribute headers can be used load Lidar attributes with tabular/ ascii format data.
Point Clouds that are loaded with the lidar tools have faster drawing and processing, can be spatially indexed, and can also take advantage of draw decluttering using a preview cloud. They are also eligible for use with the automatic classification and vector extraction tools.
To import a Lidar dataset into Global Mapper, go to the Open Data File(s) Command and select the Lidar file(s) to load.
The Lidar Load Options dialog (pictured below) will show.
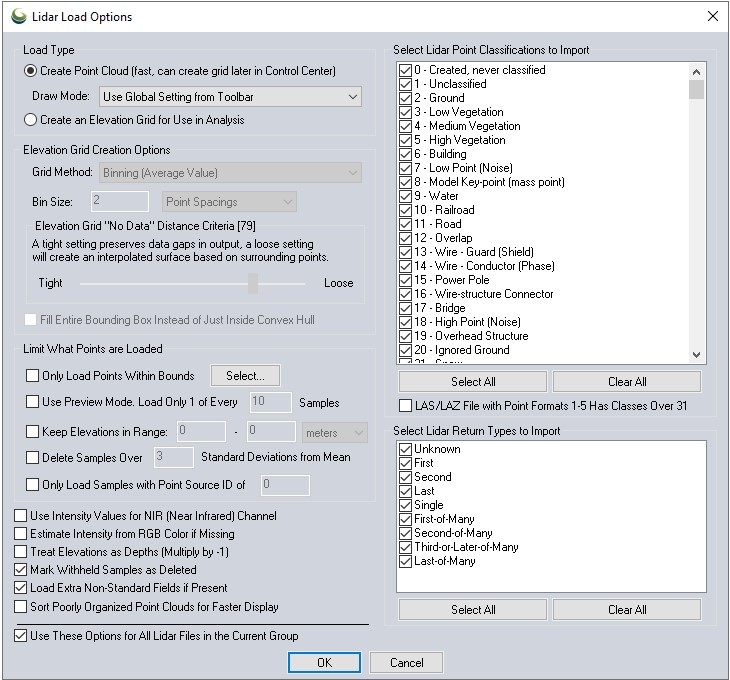
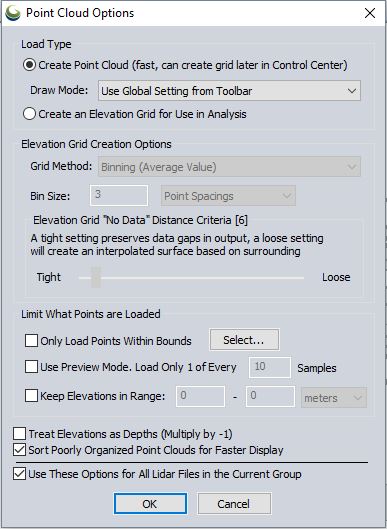
Load Type
Create Point Cloud - The 3D points in the file will be loaded as a point cloud that can be rendered by elevation, intensity (if present), or classifications. You can load a XYZ file like this to use much less memory and render it much faster than loading as full point features. If you have a XYZI (XYZ + intensity) the intensity is also applied to the point cloud. To access different rendering options for these categories click on the Draw Mode menu and select: Color by Elevation, Color by Intensity, Color by Classification, Color by Return Number.
Create an Elevation Grid for Use in Analysis - Create an elevation grid from the selected lidar data upon load, rather than drawing the data as a point cloud. Selecting this option activates the Elevation Grid Creation Options.
Elevation Grid Creation Options
Create an Elevation Grid - All lines from the file which are determined to contain 3D coordinate data will be use generate a triangulated terrain which is then gridded to create an elevation grid. This grid has all the capabilities of an imported DEM, including contour generation, line of sight and view shed analysis, and raster draping. When selecting this option, the Create Elevation Grid dialog will appear after setting up the Lidar import options to allow setting up the gridding process. The grid will be created based on user-defined Grid Method, Bin Size, and 'No Data' Distance Criteria (Tight to Loose).
Fill Entire Bounding Box Instead of Just Inside Convex Hull- select this option to create a full rectangular extent grid. When unselected the resulting grid will only contain elevation values inside of the convex hull containing the lidar data.
Limit What Points are Loaded
Only Load Points Within Bounds - Allows you to select the boundaries for importation. If you have an area feature you would like to crop the Lidar file to, select the Area Feature with the Digitizer Tool prior to choosing the Open Data File(s) Command. This will enable you to select the Crop to Selected Area Feature(s) option in the Lidar Bounds dialog. *
Use Preview Mode - Load Only X of Every Samples, samples the Lidar data, allowing for quicker import of Lidar data for preview.
Keep Elevation in Range - Choose this option to load only points that fall within a specific elevation range. This value can be specified in feet or meters.
Delete Samples Over X Standard Deviations from Mean- can remove point outliers from Lidar data sets. *
Only Load Samples with Point Source ID of X- load points from only a given point source id.
Other Options
Use Intensity Values for NIR (Near Infrared) Channel - Select this option to use the Lidar return intensity attribute for the NIR channel. An NIR value is one of the necessary values for Lidar Draw Mode setting to Color by CIR, NDVI or NDWI. Some active Lidar instruments use a wavelength within the near infrared range when collecting the data, so the intensity value of a point would equate to NIR reflectance.
Treat Elevations as Depths - Can be used for certain types of bathymetric Lidar data *
Mark Withheld Samples as Deleted - Lidar points flagged as WithHeld will be loaded as deleted features. ![]() Related Topics
Related Topics
Load Extra Non-Standard Fields if Present - Choose this option to disable the load of extra fields, such as Extra Byte Variable Length Records, to save memory. (Enabled by default)
Sort Poorly Organized Point Clouds for Faster Display - Select this option to reorganize the point cloud so that the points are sorted spatially. This will improve the performance and speed working with point clouds that are not spatially organized. *
Use
These Options for All Lidar Files in the Current Group - Will apply
Lidar import settings to all Lidar files in current group *
Select Lidar Point Classification to Import
Option to filter the load by Lidar
point Classifications. This section will only display for formats that store classifications.
Select Lidar Return Types to Import
Limits the import of Lidar files
based on the return type (i.e. first return, last return, first of many,
last of many, etc.). This section will only appear for formats that store returns.
*Some Lidar Load Options are only available when Global Mapper Pro is activated.