Automatic Ground Classification
Automatic Ground Classification is found in the Classification section of the  Automatic Point Cloud Analysis tool.
Automatic Point Cloud Analysis tool.
|
|
This tool requires Global Mapper Pro |
The Ground Classification tool detects and classifies ground points in point cloud data. There are two algorithms for ground classification: Grid MCC and Max Likelihood. Choose one of these options from the drop-down window:
- Grid MCC (Multiscale Curvature Classification) is the traditional method and was designed for aerial, fixed wing collected Lidar. This was the standard method in earlier versions of Global Mapper.
- Max Likelihood uses segmentation, and is developed to work with more modern point clouds such as terrestrial lidar, programmatic, drone mounted, etc.
You can choose to run multiple classifications at once by checking multiple options (noise, ground, etc). They will run in a pre-specified order based on method.
Use the settings in the top of the Automatic Point Cloud Analysis window to choose which layers are to be operated on, filter or limit processing, change custom segmentation settings for Max Likelihood, and more.
Once your settings have been determined for all desired classifications, click Classify Features to begin processing.
Classification and Extraction Shared Settings:
The two ground classification algorithms share one setting with the Feature Extraction tool:

Minimum Area (sq m)
This value, measured in square meters, is the smallest patch of ground in the data-set. Clusters of points smaller than this value will be ignored.
Ground Classification Settings
The Max Likelihood Method
The Max Likelihood option uses segmentation to identify and classify likely ground points from the point cloud. The Geometric Segmentation tool allows users to identify objects in the point cloud by specifying which attributes and can be used to differentiate the object from the neighboring points. The Max Likelihood Algorithm is a version of segmentation where the settings are tailored to identify ground points in a point cloud. There are 2 settings available to adjust the algorithm to a specific point cloud: Max Curvature and Minimum Area (shared setting).
-
The settings in the Geometric Segmentation tool can be used in Max Likelihood classifications. Simply open the Geometric Segmentation tool, choose your settings, and check the box to Use Custom Segmentation Parameters. These settings will influence how the point cloud is segmented.
-
To train the algorithm for your specific feature, check the box to enable Custom Feature Models. These settings will influence how the point cloud is classified.

Max Curvature
Curvature is the rate of change of the normals. Looking at a point cloud, this value measures how much curve the ground surface is allowed to have before it no longer qualifies as ground. Increase this value for rugged areas or areas with many sudden changes in slope. Decrease this value if non-ground points are being classified as ground, such as the transition between tree trunks and the ground.
The Grid MCC Method (Multiscale Curvature Classification)
The Grid MCC method provides settings that may be changed to optimize the algorithm output based on the local terrain, the range of elevation values in the data set, user-defined preferences for filtering points prior to auto-classification, or known features in the landscape. This ground classification is a two-part process that removes points that are likely not ground, and then compares the remaining points to a modeled 3D curved surface inside a series of bins (i.e. a gridding of the Lidar into smaller areas).

Bin Size
Formerly known as Base Bin Size to Check for Curvature Deviations. The MCC ground classification algorithm depends on comparing points to their neighbors inside of a small local area. The Base Bin size defines the size of that area. This value may be set in Meters or calculated from the average point spacing of the loaded data.
Smaller distances will result in higher accuracy, but will require higher resolution data and longer processing times. Those working with low resolution data should use a higher value. A value that captures at least 3 Lidar points inside of each bin is recommended, with larger bin sizes increasing the speed of processing, but also decreasing the accuracy. The default value is 2 meters, or 3 point spacings if the data is low density (less than 1.5 points per square meter).
Measurement in Point Spacings is calculated from the loaded point data. The calculated average point spacing can be viewed in the layer metadata statistics. For reproduce-able results across different data sets, such as continuous tiles of Lidar, specify a fixed value in meters for the Base Bin Size.
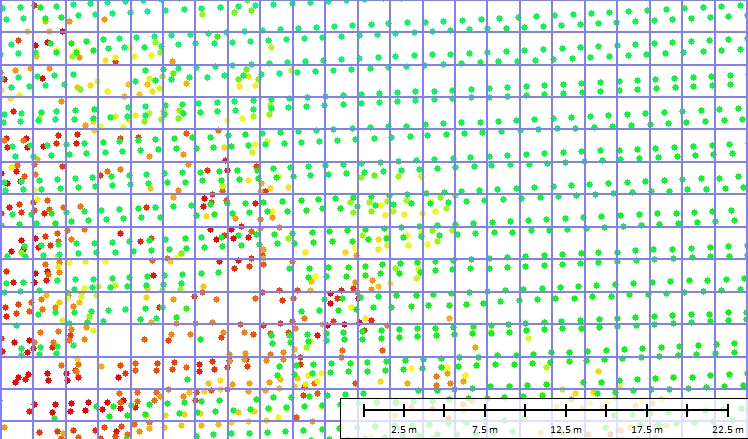
The first image simulates a 2 meter bin size on low resolution aerial Lidar. With this resolution data, a much larger bin size would not contain enough points for good classification results:
The second image simulates a 2 meter bin size on a higher resolution point cloud. This bin size will process relatively quickly on this point cloud, but could be increased to 1 meter to help with removing low vegetation or including steeper slopes in the ground classification:
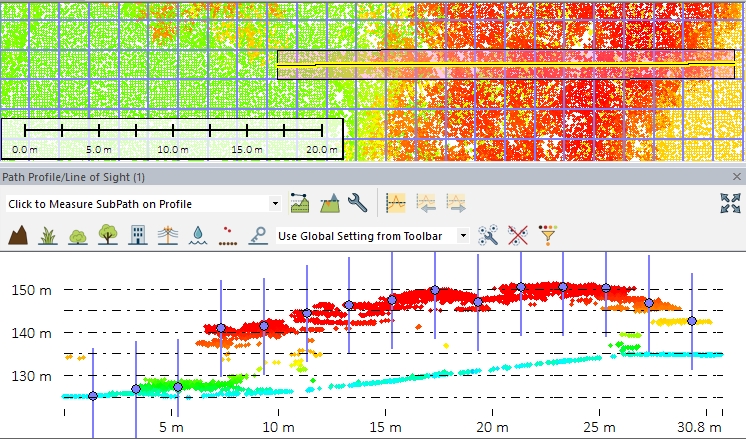
Note that many of the higher points in this case will already be removed by the setting described below in Removal of Likely non-ground points before the curvature deviation is checked.
Maximum Deviation (meters)
Previously called Minimum Height Departure from Local Mean for Non-Ground Point - Specify the allowed height change from the local averaged minimum, at which to remove points from the ground classification. This filter is used in the second part of the algorithm, for modeling a curved ground surface.
The default value of 0.3 meters works well with most medium density data that has a moderate amount of height variance in the observations. Small values will remove low vegetation and brush from the ground classification (in high density data). Larger values (such as 1 meter to 3 meters) are usually necessary for lower resolution lidar data (with a density of 2 points per square meter or less).
Maximum Height Delta
Specify the maximum change in elevation for the ground. This should be set to the expected range in elevation of the ground throughout the point cloud.
This first filter helps to remove points that definitely shouldn't be considered ground, and therefore can also speed up the processing of the remaining points. If the expected change in ground height is less than the height of buildings, this can greatly improve classification by removing relatively flat built environments from consideration.


In this dataset the urban area is relatively flat. A Maximum Height Delta of 50 meters, shown in the first image, doesn't successfully remove all of the larger building roofs. Changing the Maximum Height delta to 5 meters, as shown in the second image, easily eliminates many of the building structures from the ground class.
Max Terrain Slope
Specify the expected slope of the terrain in degrees. Built environments like building roofs and building walls typically have steep slopes. Regions of the point cloud that follow continuous surfaces but are steeper than the expected terrain slope will be removed from consideration as ground points. The default value of 7.5° is applicable to relatively flat areas without large embankments.
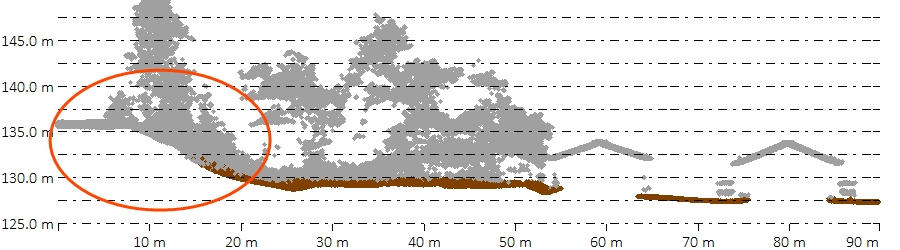
In the example below, the default expected terrain slope of 7.5° means that the steep ground section on the left side of the profile is not identified as ground:
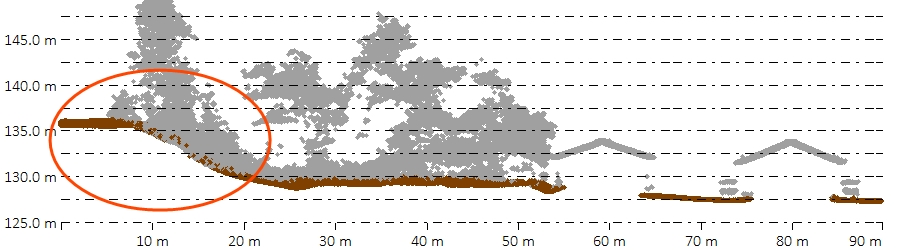
Increasing the Expected Terrain Slope to 20° captures more of the ground points:
Maximum Building Width
To remove large building roofs from the ground classification, specify the maximum building width. Larger values will cause longer processing times, but will help to remove large commercial and industrial building roofs from the ground classification.
This is part of the first filter, and compares the local minimum to neighbors in progressively larger areas. This helps to remove building roofs and other built environments from the ground category, since there are no ground returns inside those areas. Since the filter progressively builds to the maximum building width value, be aware that larger values will increase processing time.
Customization of this parameter became available in Global Mapper v19. In previous versions this value was fixed at 50 meters, which is a good value for many urban areas, but may miss some of the larger building roofs and fail to eliminate them from the ground class.
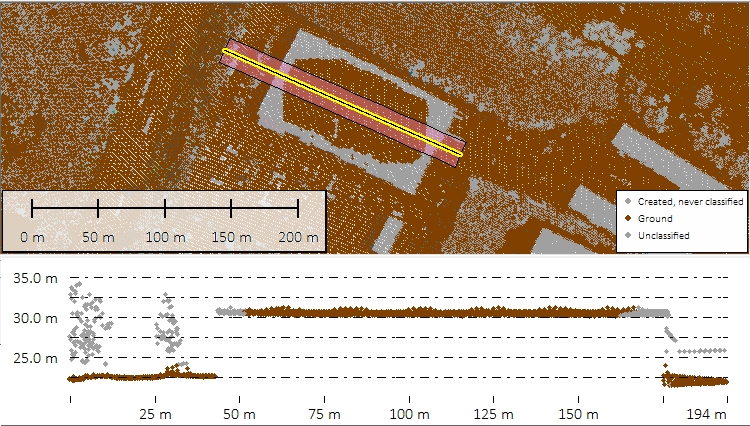
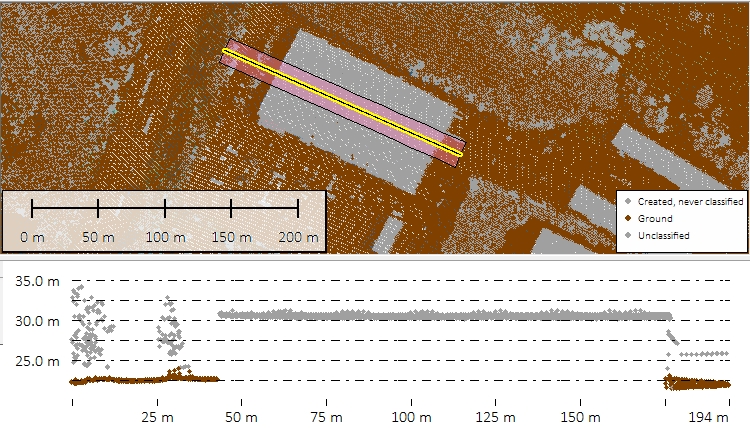
In the first example, a Max Building Width of 50 meters is unable to recognize that the large building roof is not ground. Setting the Max Building Width to 100 meters removes the building roof from the ground class.
Additional Options
Enable Report
Enable this option to see a report of the classification results and to save the classification settings as a .json file for future use or to share with other users. The Enable Report option generates a report that summarizes the settings used and the results of a classification method. The report is generated as a text file in a Reports folder at the specified location.
To load the saved settings .json file: Open the automated Point Cloud Analysis tool, check the box to Enable Custom Feature Models, then from the list of options that appear, choose Load Models.
Reset Existing Non-Ground Points to Unclassified at Start
Resets the Unclassified Non-Ground Point data, resetting any points classified as non-ground. Removes all manual and automatic classification of ground points in selected point data, setting all points to unclassified.