 Auto-Classify Powerline and Pole Points
Auto-Classify Powerline and Pole Points
The Auto-Classify Powerline and Pole points can automatically detect power lines, and/or pole like objects in high density lidar data. This density is typical of terrestrial lidar, mobile lidar, or uav collected lidar point clouds. Synthetic lidar (photo generated lidar) may also have this density, but does not typically have the reconstruction detail to precisely identify powerlines or pole like objects.
The point cloud should have ground points already classified prior to performing this classification.
This tool requires a Lidar Module license.
Select the Auto-Classify Powerline and Pole Points button from the Lidar Toolbar.
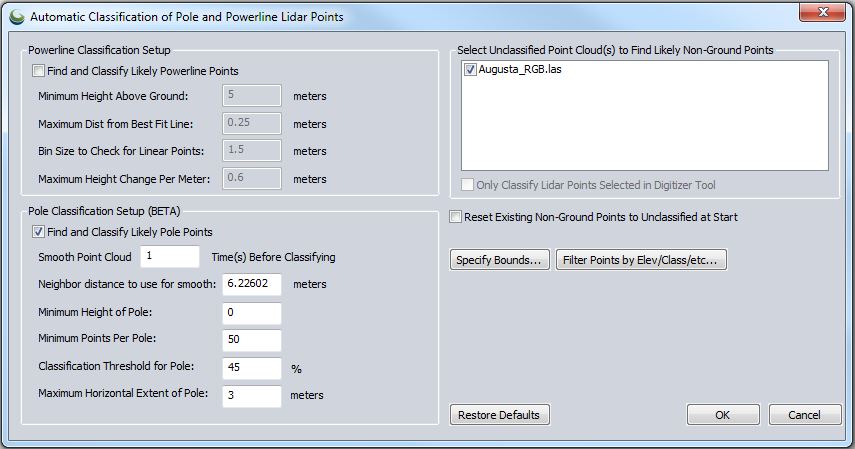
Powerline Classification Setup
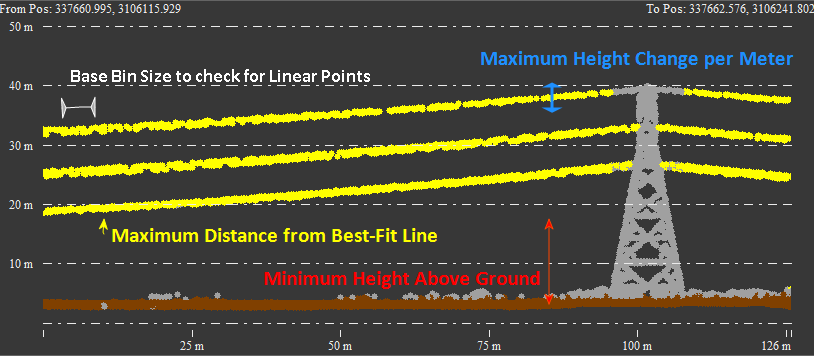
The powerline classification algorithm compares segments of data (bins) to best fit lines, to classify points as powerline that are within a minimum distance from a best-fit line. It recommended to run this data on point clouds with at least 20 points /m2.
Find and Classify Likely Powerline Points
Check this option to run the powerline classification algorithm on the specified data.
Minimum Height Above Ground
Use this field to specify the minimum height above ground that a point has to be in order to consider it as a possible powerline point.
Maximum Distance from Best Fit Line
Use this field to set the maximum distance (in meters) away from the best-fit 3D line of points with similar elevations in a bin, that any points can be and still be considered powerlines.
Bin Size to Check for Planar or Linear Points
This setting controls the size of each bin (meters per edge) when evaluating points to see if they follow a linear pattern.
Maximum Height Change per Meter
Use this field to specify the maximum difference in elevation allowed per meter to consider points as possibly part of the same powerline segment. The default value is 0.5m, which allows for a change in elevation of 0.5m over a 1m distance between points. You might wish to specify a slightly larger value if your data is noisy.
Pole Classification Setup (BETA)
The Pole Classification Tool is labeled as beta functionality due to difficulty in finding good test data for this feature by the release of version 21. If you have high resolution good test data you could share with us please contact us at beta@bluemarblegeo.com.
The Pole Classification tool will find and classify points that are poles or pole like objects, this includes similar objects such as signs, lamp-posts, etc. If you would like to classify transmission towers or telephone poles, it is recommended to first classify Powerlines (or also check the powerline option) to rule out wires that may be connected to the pole like objects.
It recommended to run this data on point clouds with at least 20 points /m2.
Find and Classify Likely Pole Points
Check this option to run the Pole classification algorithm on the specified data.
Smooth Point Cloud
Within the context of the classification algorithm, the point cloud can be smoothed so that the points more neatly align. This can improve the classification of poles. More smoothing iterations will increase the processing time.
Neighbor distance to use for smooth
This value will automatically adjust based on the loaded data, and is recommended to be between 10 and 20 points spacings. The auto-suggested value is 10 point spacings. The neighborhood distance value is used for smoothing as well as segmentation and classification. It defines how far to search near a point for other nearby points (up to the nearest 15 points).
Increase this value if no poles or not enough poles are detected in the point cloud. Increasing this value will also increase the processing time.
Minimum Height of Pole
Specify the minimum height of the desired pole objects. This will factor out point clusters that do not contain a tall enough pole object.
Minimum Points Per Pole
Specify the minimum number of points that must be contained in the object to be considered a pole.
Classification Threshold for Pole
This classification threshold determines how pole like an object is. Simple posts would typically be closer to ~ 90 - 100% pole like, where as street signs that have planar aspects and less compact geometry would typically be ~ 50 - 75% pole like. As the threshold drops down into the ~ 30 - 40% range trees would also start to be identified.
Maximum Horizontal Extent of Pole
Many pole like objects have a horizontal footprint larger than the pole itself. This value should include horizontal extent of objects attached to the pole, such as a sign or arm attachment.
Reset Existing Non-Ground Points to Unclassified at Start
Resets the classified non-ground Point data to unclassified at the beginning of processing.
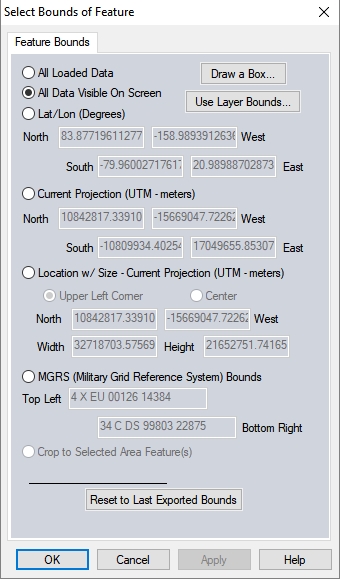
Specify Bounds
Use Specify Bounds... to set the bounds for the classification by drawing a box on the workspace, by using coordinate extents, or by cropping to a selected area feature.
{kind=link}
When classifying a large dataset, it is recommended to test the classification on a sample area. Run the classifications multiple times on the sample area, adjusting to values, to obtain a good classification result prior to processing the entire data extent.
Filter Points
Filter Points...Contains additional settings for filtering points for classification by elevation and color values, Source ID, and existing classification. The user may also exclude all points outside of a specified scan angle.