
The Auto-Classify Non-Ground Points tool allows the user to automatically classify Building , Vegetation, and Powerline Points. Clicking this option brings up the Automatic Classification of Non-Ground Lidar Points settings window (below).
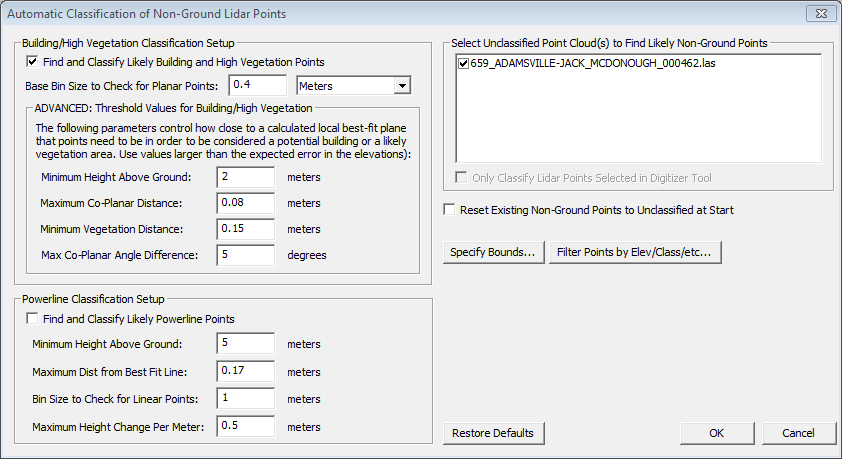
The setup options found under Building/High Vegetation Classification and Powerline Classification Setup can be used to adjust the classification parameters to ground conditions and the density and quality of the lidar points.
Check the Find and Classify Likely Building and Vegetation points to enable this algorithm, and allow modification of the below parameters.
The building and tree classification algorithm classifies points as building or tree based on their relationship to a calculated best-fit planar surface inside of each segment (bin) of lidar data. Points that are close to the calculated plane are considered building, and point that are far from the planar surface are classified as high vegetation.
This setting specifies the size of each bin using either Point Spacings or Meters when evaluating points to see how far they are from a calculated planar surface.
For example, using Point Spacings a value of "3.0" would make each square bin 3 times the calculated native spacing of the point data. To specify a spacing in meters rather than as a multiple of the native spacing for the point cloud, select 'Meters' from the drop down menu.
For building and tree classification a starting point is using the equivalent of 3 point spacings as a base bin size.
The below settings specify the exact parameters compared to the best-fit planar surface to classify building and tree points.
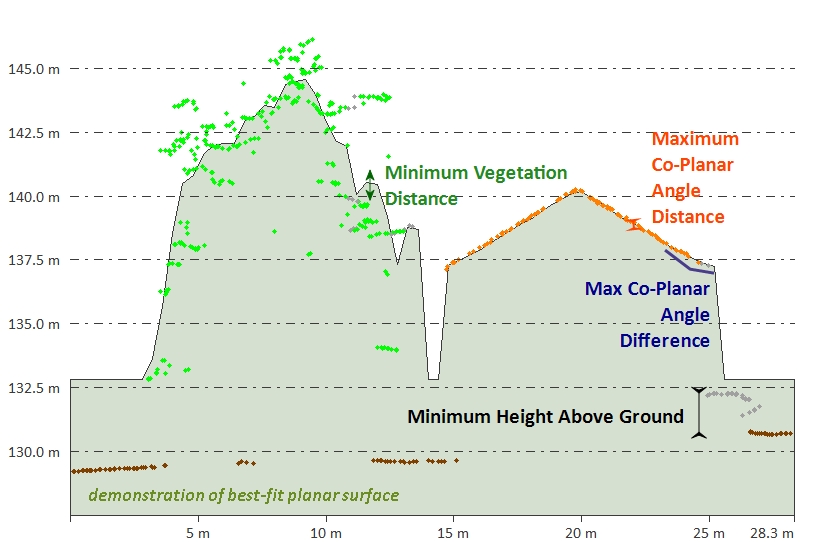
Use this setting to specify the minimum height above ground that a point has to be in order to consider it as a possible building or high vegetation point.
The default value is 2 meters. Typically buildings and high vegetation points are at least 2 to 2.5 meters above the ground, as in the example below. This value can help to eliminate other objects, such as cars, from the classification.
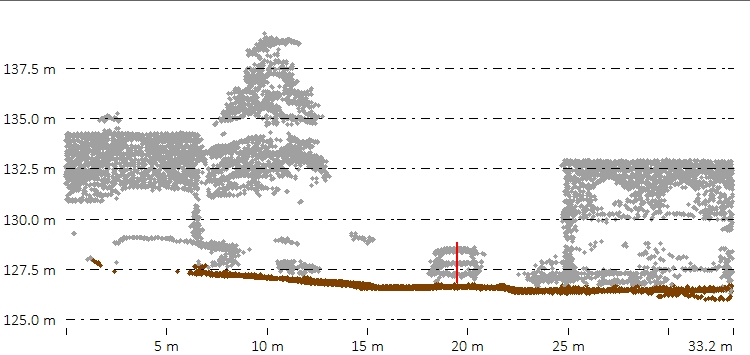
The red line in the above path profile view demonstrates the 2 meter height above ground related to a car. All points below the height above ground value will be removed from consideration as buildings or trees.
Use
this field to set the maximum co-planar distance to use for classifying
non-ground points in meters. This specifies the maximum RMSE (root mean square error) in meters from a best-fit local plane that the points in a small region all have to be within, in order to consider the region a building. It is a tolerance or error value relative to a planar surface that would represent a building.
Use this field to set the maximum distance (in meters) that the points in a small region all have to be within, in order to consider the region a potential vegetative region. Used for auto-classifying non-ground, vegetation points.
This value must be larger than the maximum co-planar distance.
Use this field to set the maximum angle difference (in degrees) to be used when auto-classifying non ground points. Specifically, this will determine the maximum angle (in degrees) between adjacent best-fit planes such that they can still be considered part of the same plane when identifying flat building surfaces.
The powerline classification algorithm compares segments of data (bins) to best fit lines to classify points as powerline that are within a minimum distance from a best-fit line.
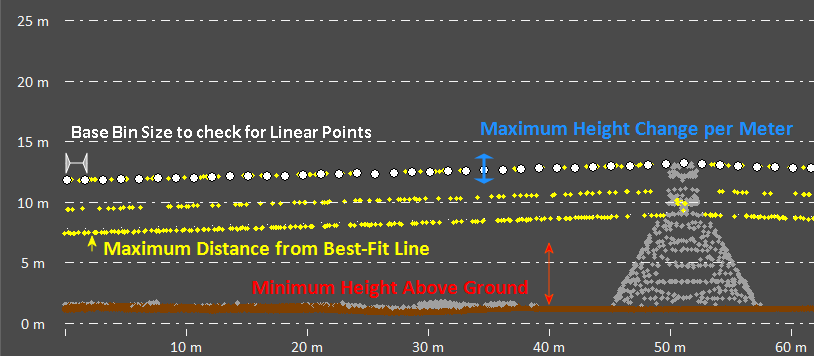
Use this field to specify the minimum height above ground that a point has to be in order to consider it as a possible powerline point.
Use this field to set the maximum distance from best fit line, specifying the maximum distance (in meters) from the best-fit 3D line of points with similar elevations in a bin that any points can be and still be considered powerlines.
This setting controls the size of each bin (meters per edge) when evaluating points to see if they follow a linear pattern.
Use this field to specify the maximum difference in elevation allowed per meter to consider points as possibly part of the same powerline segment. The default value is 0.5m, which allows for a change in elevation of 0.5m over a 1m distance between points. You might specify a slightly larger value if your data is noisy.
Use the options in the Select Unclassified Point Cloud(s) to find Likely Ground Points In if more than one Lidar data set is loaded into workspace, specific Lidar layers may be selected (check in box), or unselected (box empty), for automated classification.
Check the option to 'Only Classify Lidar Points Selected in Digitizer Tool' to run classification tool only on points selected by the Digitizer tool.
Resets the Unclassified Non-Ground Point data, resetting any points classified as non-ground. Removes all manual and automatic classification of ground points in selected point data, setting all points to unclassified.
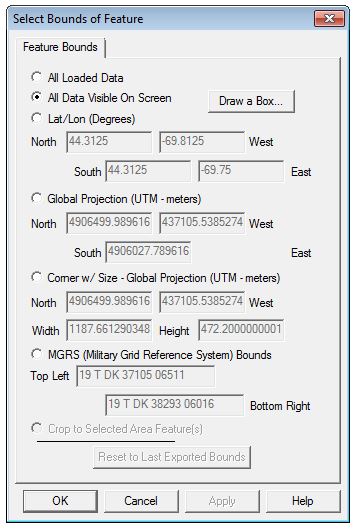
Use 'Specify Bounds...' to set the bounds for the classification by drawing a box on the workspace, using coordinate extents, or a selected area feature.
{kind=link}